06. Extrinsic Calibration
Extrinsic Calibration
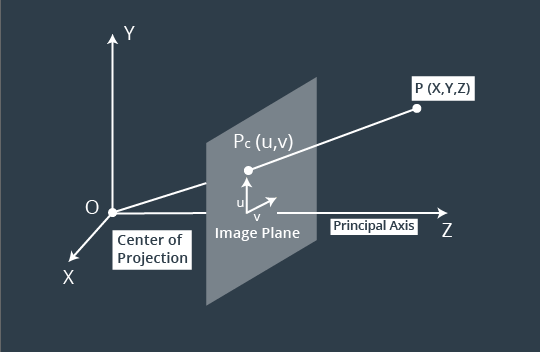
The relationship between the position of a point in the 2D pixel coordinates and the position of a corresponding point in the 3D world coordinates, is defined by the pinhole camera model:
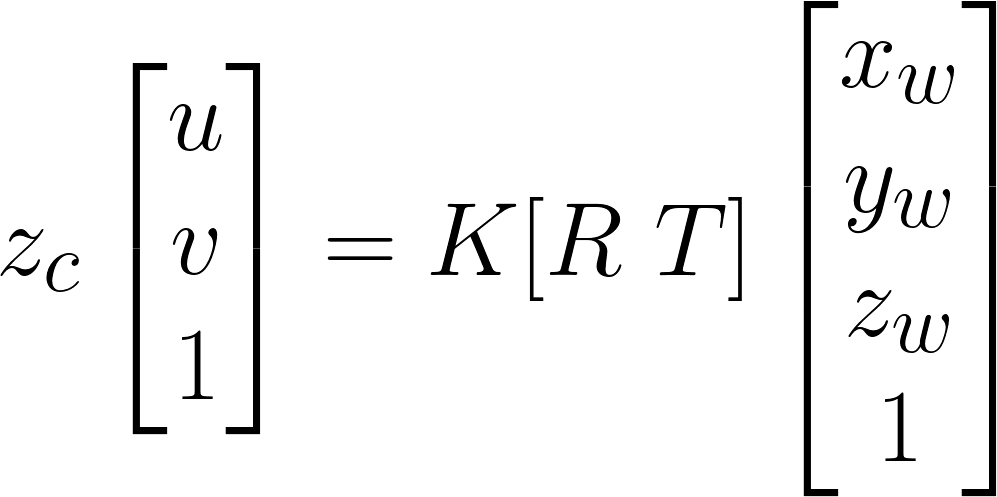
Where K represents the intrinsic matrix derived in the previous section.
R and T are the extrinsic parameters which denote the coordinate system transformations from 3D world coordinates to 3D camera coordinates.
Equivalently, the extrinsic parameters define the position of the camera center and the camera's heading in world coordinates.
T is the position of the origin of the world coordinate system expressed in coordinates of the camera-centered coordinate system.
While, the position of the camera C = -R’ T
Since the extrinsic parameters determine the 3D pose of respective camera in the world coordinates, they can also be used for the process of image registration.
Image registration refers to transforming the data frame from one camera to match the data frame from the other pixel by pixel.
This is absolutely essential for the creation of an accurate point cloud.